Non-blocking Communication
Overview
Teaching: 15 min
Exercises: 20 minQuestions
What are the advantages of non-blocking communication?
How do I use non-blocking communication?
Objectives
Understand the advantages and disadvantages of non-blocking communication
Know how to use non-blocking communication functions
In the previous episodes, we learnt how to send messages between two ranks or collectively to multiple ranks. In both cases, we used blocking communication functions which meant our program wouldn’t progress until the communication had completed. It takes time and computing power to transfer data into buffers, to send that data around (over the network) and to receive the data into another rank. But for the most part, the CPU isn’t actually doing much at all during communication, when it could still be number crunching.
Why bother with non-blocking communication?
Non-blocking communication is communication which happens in the background. So we don’t have to let any CPU cycles go to waste! If MPI is dealing with the data transfer in the background, we can continue to use the CPU in the foreground and keep doing tasks whilst the communication completes. By overlapping computation with communication, we hide the latency/overhead of communication. This is critical for lots of HPC applications, especially when using lots of CPUs, because, as the number of CPUs increases, the overhead of communicating with them all also increases. If you use blocking synchronous sends, the time spent communicating data may become longer than the time spent creating data to send! All non-blocking communications are asynchronous, even when using synchronous sends, because the communication happens in the background, even though the communication cannot complete until the data is received.
So, how do I use non-blocking communication?
Just as with buffered, synchronous, ready and standard sends, MPI has to be programmed to use either blocking or non-blocking communication. For almost every blocking function, there is a non-blocking equivalent. They have the same name as their blocking counterpart, but prefixed with “I”. The “I” stands for “immediate”, indicating that the function returns immediately and does not block the program. The table below shows some examples of blocking functions and their non-blocking counterparts.
Blocking Non-blocking MPI_Bsend()MPI_Ibsend()MPI_Barrier()MPI_Ibarrier()MPI_Reduce()MPI_Ireduce()But, this isn’t the complete picture. As we’ll see later, we need to do some additional bookkeeping to be able to use non-blocking communications.
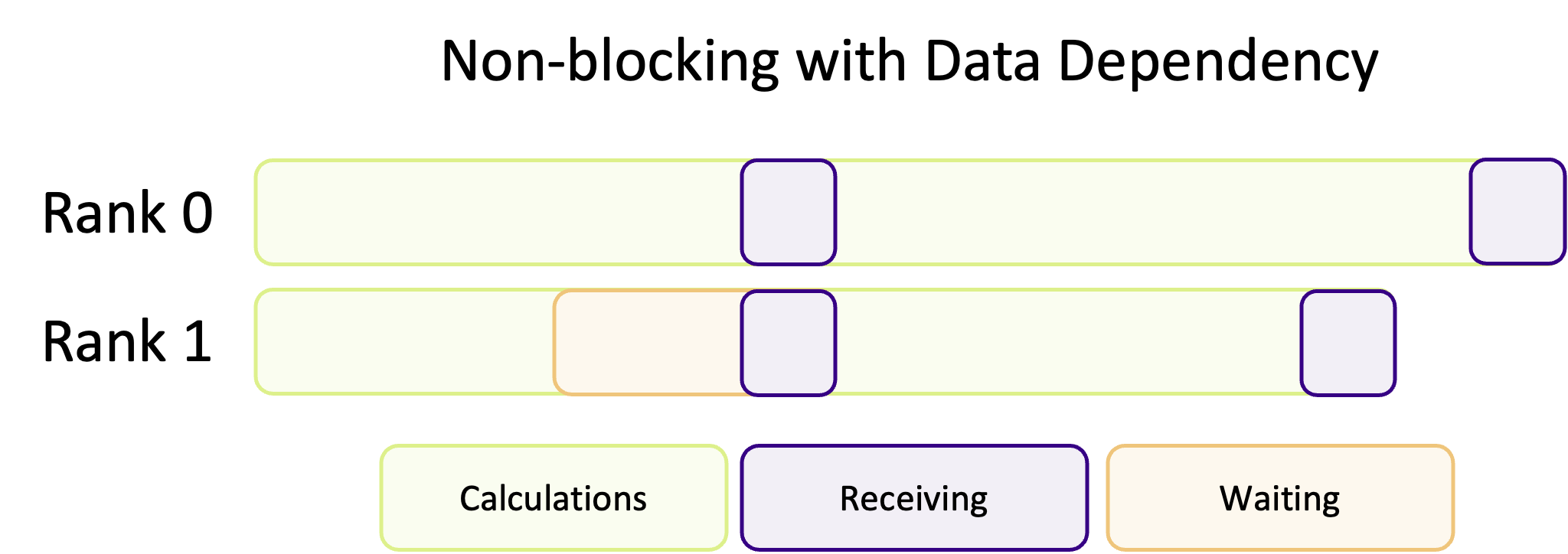
By effectively utilizing non-blocking communication, we can develop applications that scale significantly better during intensive communication. However, this comes with the trade-off of both increased conceptual and code complexity. Since non-blocking communication doesn’t keep control until the communication finishes, we don’t actually know if a communication has finished unless we check; this is usually referred to as synchronisation, as we have to keep ranks in sync to ensure they have the correct data. So whilst our program continues to do other work, it also has to keep pinging to see if the communication has finished, to ensure ranks are synchronised. If we check too often, or don’t have enough tasks to “fill in the gaps”, then there is no advantage to using non-blocking communication and we may replace communication overheads with time spent keeping ranks in sync! It is not always clear cut or predictable if non-blocking communication will improve performance. For example, if one ranks depends on the data of another, and there are no tasks for it to do whilst it waits, that rank will wait around until the data is ready, as illustrated in the diagram below. This essentially makes that non-blocking communication a blocking communication. Therefore unless our code is structured to take advantage of being able to overlap communication with computation, non-blocking communication adds complexity to our code for no gain.
Advantages and disadvantages
What are the main advantages of using non-blocking communication, compared to blocking? What about any disadvantages?
Solution
Some of the advantages of non-blocking communication over blocking communication include:
- Non-blocking communication gives us the ability to interleave communication with computation. By being able to use the CPU whilst the network is transmitting data, we create algorithms with more efficient hardware usage.
- Non-blocking communication also improve the scalability of our program, due to the smaller communication overhead and latencies associated with communicating between a large number of ranks.
- Non-blocking communication is more flexible, which allows for more sophisticated parallel and communication algorithms.
On the other hand, some disadvantages are:
- It is more difficult to use non-blocking communication. Not only does it result in more, and more complex, lines of code, we also have to worry about rank synchronisation and data dependency.
- Whilst typically using non-blocking communication, where appropriate, improves performance, it’s not always clear cut or predictable if non-blocking will result in sufficient performance gains to justify the increased complexity.
Point-to-point communication
For each blocking communication function we’ve seen, a non-blocking variant exists. For example, if we take
MPI_Send(), the non-blocking variant is MPI_Isend() which has the arguments,
int MPI_Isend(
void *buf,
int count,
MPI_Datatype datatype,
int dest,
int tag,
MPI_Comm comm,
MPI_Request *request
);
*buf: |
The data to be sent |
count: |
The number of elements of data |
datatype: |
The data types of the data |
dest: |
The rank to send data to |
tag: |
The communication tag |
comm: |
The communicator |
*request: |
The request handle, used to track the communication |
The arguments are identical to MPI_Send(), other than the addition of the *request argument. This argument is known
as an handle (because it “handles” a communication request) which is used to track the progress of a (non-blocking)
communication.
When we use non-blocking communication, we have to follow it up with MPI_Wait() to synchronise the
program and make sure *buf is ready to be re-used. This is incredibly important to do. Suppose we are sending an array
of integers,
MPI_Isend(some_ints, 5, MPI_INT, 1, 0, MPI_COMM_WORLD, &request);
some_ints[1] = 5; /* !!! don't do this !!! */
Modifying some_ints before the send has completed is undefined behaviour, and can result in breaking results! For
example, if MPI_Isend decides to use its buffered mode then modifying some_ints before it’s finished being copied to
the send buffer will means the wrong data is sent. Every non-blocking communication has to have a corresponding
MPI_Wait(), to wait and synchronise the program to ensure that the data being sent is ready to be modified again.
MPI_Wait() is a blocking function which will only return when a communication has finished.
int MPI_Wait(
MPI_Request *request,
MPI_Status *status
);
*request: |
The request handle for the communication |
*status: |
The status handle for the communication |
Once we have used MPI_Wait() and the communication has finished, we can safely modify some_ints again. To receive
the data send using a non-blocking send, we can use either the blocking MPI_Recv() or it’s non-blocking variant,
int MPI_Irecv(
void *buf, /* The buffer to receive data into */
int count, /* The number of elements of data to receive */
MPI_Datatype datatype, /* The datatype of the data being received */
int source, /* The rank to receive data from */
int tag, /* The communication tag */
MPI_Comm comm, /* The communicator to use */
MPI_Request *request, /* The communication request handle */
);
*buf: |
A buffer to receive data into |
count: |
The number of elements of data to receive |
datatype: |
The data type of the data |
source: |
The rank to receive data from |
tag: |
The communication tag |
comm: |
The communicator |
*request: |
The request handle for the receive |
True or false?
Is the following statement true or false? Non-blocking communication guarantees immediate completion of data transfer.
Solution
False. Just because the communication function has returned, does not mean the communication has finished and the communication buffer is ready to be re-used or read from. Before we access, or edit, any data which has been used in non-blocking communication, we always have to test/wait for the communication to finish using
MPI_Wait()before it is safe to use it.
In the example below, an array of integers (some_ints) is sent from rank 0 to rank 1 using non-blocking communication.
MPI_Status status;
MPI_Request request;
int recv_ints[5];
int some_ints[5] = { 1, 2, 3, 4, 5 };
if (my_rank == 0) {
MPI_Isend(some_ints, 5, MPI_INT, 1, 0, MPI_COMM_WORLD, &request);
MPI_Wait(&request, &status);
some_ints[1] = 42; // After MPI_Wait(), some_ints has been sent and can be modified again
} else {
MPI_Irecv(recv_ints, 5, MPI_INT, 0, 0, MPI_COMM_WORLD, &request);
MPI_Wait(&request, &status);
int data_i_wanted = recv_ints[2]; // recv_ints isn't guaranteed to have the correct data until after MPI_Wait()
}
The code above is functionally identical to blocking communication, because of MPI_Wait() is blocking. The program
will not continue until MPI_Wait() returns. Since there is no additional work between the communication call and
blocking wait, this is a poor example of how non-blocking communication should be used. It doesn’t take advantage of the
asynchronous nature of non-blocking communication at all. To really make use of non-blocking communication, we need to
interleave computation (or any busy work we need to do) with communication, such as as in the next example.
MPI_Status status;
MPI_Request request;
if (my_rank == 0) {
// This send important_data without being blocked and move into the next work
MPI_Isend(important_data, 16, MPI_INT, 1, 0, MPI_COMM_WORLD, &request);
} else {
// Start listening for the message from the other rank, but isn't blocked
MPI_Irecv(important_data, 16, MPI_INT, 0, 0, MPI_COMM_WORLD, &request);
}
// Whilst the message is still sending or received, we should do some other work
// to keep using the CPU (which isn't required for most of the communication.
// IMPORTANT: the work here cannot modify or rely on important_data */
clear_model_parameters();
initialise_model();
// Once we've done the work which doesn't require important_data, we need to wait until the
// data is sent/received if it hasn't already */
MPI_Wait(&request, &status);
// Now the model is ready and important_data has been sent/received, the simulation
// carries on
simulate_something(important_data);
What about deadlocks?
Deadlocks are easily created when using blocking communication. The code snippet below shows an example of deadlock from one of the previous episodes.
if (my_rank == 0) { MPI_Send(&numbers, 8, MPI_INT, 1, 0, MPI_COMM_WORLD); MPI_Recv(&numbers, 8, MPI_INT, 1, 0, MPI_COMM_WORLD, &status); } else { MPI_Send(&numbers, 8, MPI_INT, 0, 0, MPI_COMM_WORLD); MPI_Recv(&numbers, 8, MPI_INT, 0, 0, MPI_COMM_WORLD, &status); }If we changed to non-blocking communication, do you think there would still be a deadlock? Try writing your own non-blocking version.
Solution
The non-blocking version of the code snippet may look something like this:
MPI_Request send_req, recv_req; if (my_rank == 0) { MPI_Isend(numbers, 8, MPI_INT, 1, 0, MPI_COMM_WORLD, &send_req); MPI_Irecv(numbers, 8, MPI_INT, 1, 0, MPI_COMM_WORLD, &recv_req); } else { MPI_Isend(numbers, 8, MPI_INT, 0, 0, MPI_COMM_WORLD, &send_req); MPI_Irecv(numbers, 8, MPI_INT, 0, 0, MPI_COMM_WORLD, &recv_req); } MPI_Status statuses[2]; MPI_Request requests[2] = { send_req, recv_req }; MPI_Waitall(2, requests, statuses); // Wait for both requests in one functionThis version of the code will not deadlock, because the non-blocking functions return immediately. So even though rank 0 and 1 one both send, meaning there is no corresponding receive, the immediate return from send means the receive function is still called. Thus a deadlock cannot happen.
However, it is still possible to create a deadlock using
MPI_Wait(). IfMPI_Wait()is waiting to forMPI_Irecv()to get some data, but there is no matching send operation (so no data has been sent), thenMPI_Wait()can never return resulting in a deadlock. In the example code below, rank 0 becomes deadlocked.MPI_Status status; MPI_Request send_req, recv_req; if (my_rank == 0) { MPI_Isend(numbers, 8, MPI_INT, 1, 0, MPI_COMM_WORLD, &send_req); MPI_Irecv(numbers, 8, MPI_INT, 1, 0, MPI_COMM_WORLD, &recv_req); } else { MPI_Irecv(numbers, 8, MPI_INT, 0, 0, MPI_COMM_WORLD, &recv_req); } MPI_Wait(&send_req, &status); MPI_Wait(&recv_req, &status); // Wait for both requests in one function
To wait, or not to wait
In some sense, by using MPI_Wait() we aren’t fully non-blocking because we still block execution whilst we wait for
communications to complete. To be “truly” asynchronous we can use another function called MPI_Test() which, at face
value, is the non-blocking counterpart of MPI_Wait(). When we use MPI_Test(), it checks if a communication is
finished and sets the value of a flag to true if it is and returns. If a communication hasn’t finished, MPI_Test()
still returns but the value of the flag is false instead. MPI_Test() has the following arguments,
int MPI_Test(
MPI_Request *request,
int *flag,
MPI_Status *status,
);
*request: |
The request handle for the communication |
*flag: |
A flag to indicate if the communication has completed |
*status: |
The status handle for the communication |
*request and *status are the same you’d use for MPI_Wait(). *flag is the variable which is modified to indicate
if the communication has finished or not. Since it’s an integer, if the communication hasn’t finished then flag == 0.
We use MPI_Test() is much the same way as we’d use MPI_Wait(). We start a non-blocking communication, and keep doing
other, independent, tasks whilst the communication finishes. The key difference is that since MPI_Test() returns
immediately, we may need to make multiple calls before the communication is finished. In the code example below,
MPI_Test() is used within a while loop which keeps going until either the communication has finished or until
there is no other work left to do.
MPI_Status status;
MPI_Request request;
MPI_Irecv(recv_buffer, 16, MPI_INT, 0, 0, MPI_COMM_WORLD, &request);
// We need to define a flag, to track when the communication has completed
int comm_completed = 0;
// One example use case is keep checking if the communication has finished, and continuing
// to do CPU work until it has
while (!comm_completed && work_still_to_do()) {
do_some_other_work();
// MPI_Test will return flag == true when the communication has finished
MPI_Test(&request, &comm_completed, &status);
}
// If there is no more work and the communication hasn't finished yet, then we should wait
// for it to finish
if (!comm_completed) {
MPI_Wait(&request, &status);
}
Dynamic task scheduling
Dynamic task schedulers are a class of algorithms designed to optimise the work load across ranks. The most efficient, and, really, only practical, implementations use non-blocking communication to periodically check the work balance and asynchronously assign and send additional work to a rank, in the background, as it continues to work on its current queue of work.
An interesting aside: communication timeouts
Non-blocking communication gives us a lot of flexibility, letting us write complex communication algorithms to experiment and find the right solution. One example of that flexibility is using
MPI_Test()to create a communication timeout algorithm.#define COMM_TIMEOUT 60 // seconds clock_t start_time = clock(); double elapsed_time = 0.0; int comm_completed = 0 while (!comm_completed && elapsed_time < COMM_TIMEOUT) { // Check if communication completed MPI_Test(&request, &comm_completed, &status); // Update elapsed time elapsed_time = (double)(clock() - start_time) / CLOCKS_PER_SEC; } if (elapsed_time >= COMM_TIMEOUT) { MPI_Cancel(&request); // Cancel the request to stop the, e.g. receive operation handle_communication_errors(); // Put the program into a predictable state }Something like this would effectively remove deadlocks in our program, and allows us to take appropriate actions to recover the program back into a predictable state. In reality, however, it would be hard to find a useful and appropriate use case for this in scientific computing. In any case, though, it demonstrate the power and flexibility offered by non-blocking communication.
Try it yourself
In the MPI program below, a chain of ranks has been set up so one rank will receive a message from the rank to its left and send a message to the one on its right, as shown in the diagram below:
For following skeleton below, use non-blocking communication to send
send_messageto the right right and receive a message from the left rank. Create two programs, one usingMPI_Wait()and the other usingMPI_Test().#include <mpi.h> #include <stdio.h> #define MESSAGE_SIZE 32 int main(int argc, char **argv) { int my_rank; int num_ranks; MPI_Init(&argc, &argv); MPI_Comm_rank(MPI_COMM_WORLD, &my_rank); MPI_Comm_size(MPI_COMM_WORLD, &num_ranks); if (num_ranks < 2) { printf("This example requires at least two ranks\n"); MPI_Abort(MPI_COMM_WORLD, 1); } char send_message[MESSAGE_SIZE]; char recv_message[MESSAGE_SIZE]; int right_rank = (my_rank + 1) % num_ranks; int left_rank = my_rank < 1 ? num_ranks - 1 : my_rank - 1; sprintf(send_message, "Hello from rank %d!", my_rank); // Your code goes here return MPI_Finalize(); }The output from your program should look something like this:
Rank 0: message received -- Hello from rank 3! Rank 1: message received -- Hello from rank 0! Rank 2: message received -- Hello from rank 1! Rank 3: message received -- Hello from rank 2!Solution
Note that in the solution below, we started listening for the message before
send_messageeven had its message ready!#include <mpi.h> #include <stdbool.h> #include <stdio.h> #define MESSAGE_SIZE 32 int main(int argc, char **argv) { int my_rank; int num_ranks; MPI_Init(&argc, &argv); MPI_Comm_rank(MPI_COMM_WORLD, &my_rank); MPI_Comm_size(MPI_COMM_WORLD, &num_ranks); if (num_ranks < 2) { printf("This example requires at least two ranks\n"); return MPI_Finalize(); } char send_message[MESSAGE_SIZE]; char recv_message[MESSAGE_SIZE]; int right_rank = (my_rank + 1) % num_ranks; int left_rank = my_rank < 1 ? num_ranks - 1 : my_rank - 1; MPI_Status send_status, recv_status; MPI_Request send_request, recv_request; MPI_Irecv(recv_message, MESSAGE_SIZE, MPI_CHAR, left_rank, 0, MPI_COMM_WORLD, &recv_request); sprintf(send_message, "Hello from rank %d!", my_rank); MPI_Isend(send_message, MESSAGE_SIZE, MPI_CHAR, right_rank, 0, MPI_COMM_WORLD, &send_request); MPI_Wait(&send_request, &send_status); MPI_Wait(&recv_request, &recv_status); /* But maybe you prefer MPI_Test() int recv_flag = false; while (recv_flag == false) { MPI_Test(&recv_request, &recv_flag, &recv_status); } */ printf("Rank %d: message received -- %s\n", my_rank, recv_message); return MPI_Finalize(); }
Collective communication
Since the release of MPI 3.0, the collective operations have non-blocking versions. Using these non-blocking collective
operations is as easy as we’ve seen for point-to-point communication in the last section. If we want to do a
non-blocking reduction, we’d use MPI_Ireduce(),
int MPI_Ireduce(
const void *sendbuf,
void *recvbuf,
int count,
MPI_Datatype datatype,
MPI_Op op,
int root,
MPI_Comm comm,
MPI_Request *request,
);
*sendbuf: |
The data to be reduced by the root rank |
*recvbuf: |
A buffer to contain the reduction output |
count: |
The number of elements of data to be reduced |
datatype: |
The data type of the data |
op: |
The reduction operation to perform |
root: |
The root rank, which will perform the reduction |
comm: |
The communicator |
*request: |
The request handle for the communicator |
As with MPI_Send() vs. MPI_Isend() the only change in using the non-blocking variant of MPI_Reduce() is the
addition of the *request argument, which returns a request handle. This is the request handle we’ll use with either
MPI_Wait() or MPI_Test() to ensure that the communication has finished, and been successful. The below code examples
shows a non-blocking reduction,
MPI_Status status;
MPI_Request request;
int recv_data;
int send_data = my_rank + 1;
/* MPI_Iallreduce is the non-blocking version of MPI_Allreduce. This reduction operation will sum send_data
for all ranks and distribute the result back to all ranks into recv_data */
MPI_Iallreduce(&send_data, &recv_data, 1, MPI_INT, MPI_SUM, MPI_COMM_WORLD, &request);
/* Remember, using MPI_Wait() straight after the communication is equivalent to using a blocking communication */
MPI_Wait(&request, &status);
What’s
MPI_Ibarrier()all about?In the previous episode, we learnt that
MPI_Barrier()is a collective operation we can use to bring all the ranks back into synchronisation with one another. How do you think the non-blocking variant,MPI_Ibarrier(), is used and how might you use this in your program? You may want to read the relevant documentation first.Solution
When a rank reaches a non-blocking barrier,
MPI_Ibarrier()will return immediately whether other ranks have reached the barrier or not. The behaviour of the barrier we would expect is enforced at the nextMPI_Wait()(orMPI_Test()) operation.MPI_Wait()will return once all the ranks have reached the barrier.Non-blocking barriers can be used to help hide/reduce synchronisation overhead. We may want to add a synchronisation point in our program so the ranks start some work all at the same time. With a blocking barrier, the ranks have to wait for every rank to reach the barrier, and can’t do anything other than wait. But with a non-blocking barrier, we can overlap the barrier operation with other, independent, work whilst ranks wait for the other ranks to catch up.
Reduce and broadcast
Using non-blocking collective communication, calculate the sum of
my_num = my_rank + 1from each MPI rank and broadcast the value of the sum to every rank. To calculate the sum, use eitherMPI_Igather()orMPI_Ireduce(). You should use the code below as your starting point.#include <mpi.h> #include <stdio.h> int main(int argc, char **argv) { int my_rank; int num_ranks; MPI_Init(&argc, &argv); MPI_Comm_rank(MPI_COMM_WORLD, &my_rank); MPI_Comm_size(MPI_COMM_WORLD, &num_ranks); if (num_ranks < 2) { printf("This example needs at least 2 ranks\n"); MPI_Finalize(); return 1; } int sum = 0; int my_num = my_rank + 1; printf("Start : Rank %d: my_num = %d sum = %d\n", my_rank, my_num, sum); // Your code goes here printf("End : Rank %d: my_num = %d sum = %d\n", my_rank, my_num, sum); return MPI_Finalize(); }For two ranks, the output should be:
Start : Rank 0: my_num = 1 sum = 0 Start : Rank 1: my_num = 2 sum = 0 End : Rank 0: my_num = 1 sum = 3 End : Rank 1: my_num = 2 sum = 3Solution
The solution below uses
MPI_Irduce()to calculate the sum andMPI_Ibcast()to broadcast it to all ranks. For an even shorter solution,MPI_Ireduceall()would also achieve the same thing in a single line!int main(int argc, char **argv) { int my_rank; int num_ranks; MPI_Init(&argc, &argv); MPI_Comm_rank(MPI_COMM_WORLD, &my_rank); MPI_Comm_size(MPI_COMM_WORLD, &num_ranks); if (num_ranks < 2) { printf("This example needs at least 2 ranks\n"); MPI_Finalize(); return 1; } int sum = 0; int my_num = my_rank + 1; printf("Start : Rank %d: my_num = %d sum = %d\n", my_rank, my_num, sum); MPI_Status status; MPI_Request request; MPI_Ireduce(&my_num, &sum, 1, MPI_INT, MPI_SUM, 0, MPI_COMM_WORLD, &request); MPI_Wait(&request, &status); MPI_Ibcast(&sum, 1, MPI_INT, 0, MPI_COMM_WORLD, &request); MPI_Wait(&request, &status); printf("End : Rank %d: my_num = %d sum = %d\n", my_rank, my_num, sum); return MPI_Finalize(); }
Key Points
Non-blocking communication often leads to performance improvements compared to blocking communication
However, it is usually more difficult to use non-blocking communication
Most blocking communication operations have a non-blocking variant
We have to wait for a communication to finish using
MPI_Wait()(orMPI_Test()) otherwise we will encounter strange behaviour